What is SEAMORPH
-
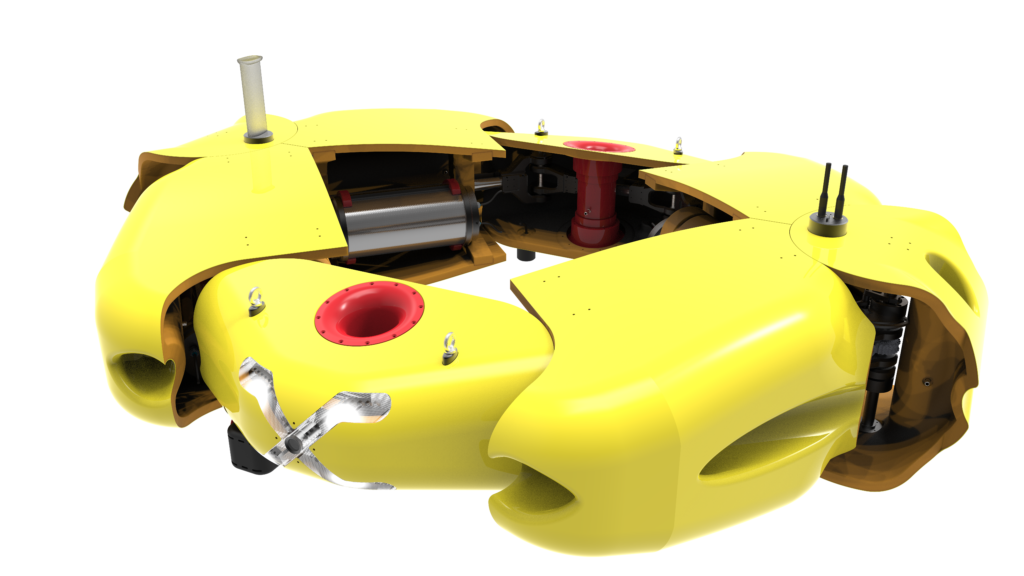
- The best shape for every task
SEAMORPH mission is to exploit the patented RUVIFIST design concept for underwater robots that allows changes of shape and performance according to the mission at hand.
How it works
To perform close inspection and intervention the shape is stocky, the vertical actuators are placed far away from each other and the horizontal actuator are deployed in a vector configuration.
In this configuration SEAMORPH has the same effectiveness and efficiency of an ROV-like compact, volumetric vehicle. Aim: Best motion and thrust isotropy.
To perform fast surveys on large tracks of seabed the shape is changed into a slender, hydrodynamic one, the 4 horizontal thruster are aligned with the surge axis. Surveys are performed with the same effectiveness and efficiency of torpedo-shaped AUV. Aim: Best efficiency and energy autonomy.

Weight
90 kg
Operation Depth
100 m
Length and Width
Hovering configuration 1.2m x 1.8m
Survey configuration 1.2m x 0.6m
Autonomy
3 h
Why SEAMORPH
- Two robots in one
RUVIFIST by SEAMORPH is the acronym for Reconfigurable Underwater Vehicle for Inspection, Free-floating Intervention and Survey Tasks.
Applications where both survey tasks and hovering tasks must be performed, require the use of at least two vehicles, a survey one and a hovering one.
No commercially available vehicle exists which can effectively and efficiently perform both survey tasks and hovering tasks.
The patented RUVIFIST design concept is suitable for all the applications where both survey tasks and hovering tasks are required.
Our Team

Benedetto Allotta
Benedetto Allotta is Project Manager of SEAMORPH. He is Full Professor of Robotics at the University of Florence and the Coordinator of the Master’s Study Course in Robotics, Automation and electrical Engineering. In 2010 he founded, from scratch, a research group in Underwater Robotics which is now very well known in the International community. He has been the founder of spin-off companies of the Scuola Superiore Sant’Anna and the University of Florence.

Mauro Bonfanti
Mauro Bonfanti was born in Crema (Italy) in 1992. He received the Ph.D. degree in Mechanical Engineering from the Politecnico di Torino, in 2021. He is currently an academic researcher (RTDA) at the Politecnico di Torino, with a focus on wave energy conversion systems, hydrofoil-equipped boats, autonomous navigation applied to the waterborne mobility, and zero-emission hybrid propulsion systems for marine vessels.

Alessandro Ridolfi
Alessandro Ridolfi is Scientific Advisor of SEAMORPH. He is Associate Professor of Robotics at the University of Florence. His main research activities concern Robotics, marine robotics, the study of control systems, mechatronics and vehicle dynamics. Since January 2015 he has also been Adjunct Professor teaching the course Dynamics (ECS 222) at Syracuse University in Florence (SUF). He is in charge of several national and international research projects on the development and the application of Underwater Robotics Systems.

Fabio Carapellese
Ph.D., is an RTDA at the Marine Offshore Renewable Energy Lab (MOREnergy Lab) at Politecnico di Torino, Italy. He earned his Ph.D. in Mechanical Engineering from Politecnico di Torino, specializing in the design and control of wave energy conversion systems. His current research focuses on control and modeling of autonomous underwater vehicle technologies, with a particular emphasis on path generation and path-following algorithm.
info@seamorphrobotics.com